ContextCapture 17中文破解版-ContextCapture Center Update 17软件下载(附破解补丁)
ContextCapture 17是一款可由平面图像来实现3D建模解决方案,它能将基于简单的照片和点云数据集来生成甚至是最具挑战性3D模型,期间不需要任何昂贵的专业设备,且创建速度也是业内数一数二的;还可以利用这些非常详细的3D现实网格,为整个项目设计、施工和运营决策分享精确的现实仿真环境。它的原理是分析来自不同视点的静态主体的几张照片或者项目平面图,且自动检测对应于同一物理点的像素,再利用这样的对应关系,便可推断出照片的相对方向和场景的准确3D模型。并且知识兔,无论是在PC端还是移动设备上都可以轻松以多种格式共享信息以及建模数据,甚至可以利用软件强大的功能套件来创建满足您特殊需求的自定义解决方案!此外,新版的ContextCapture 17能更有效地利用摄像机系统,即使知识兔摄像机位不是完全同步,都可以获得最佳的空间三角测量结果!还可利用从XML文件系统升级到数据库的JobQueue架构所启用的新的JobQueue监控API;并且知识兔,还致力于更大规模的3D测绘,软件可以处理无限数量的照片和/或激光扫描,没有任何大小限制,并允许计算在一个集群的3D重建引擎上同时运行,大大的提高了建模效率!插图")
安装破解教程
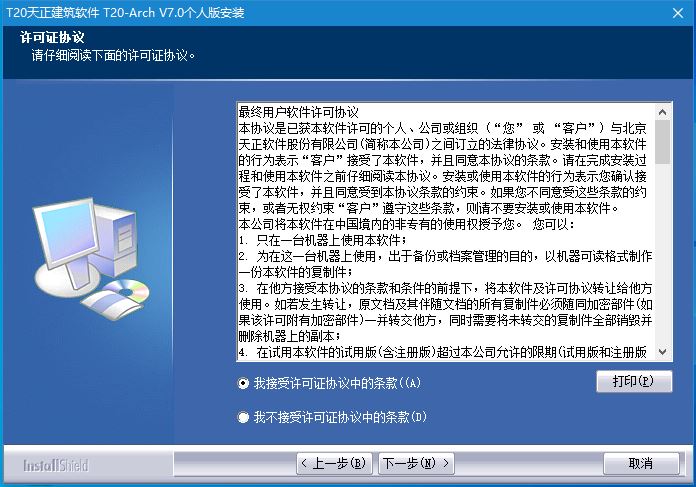
1.在知识兔下载好数据包后进行解压得到安装程序“cncpc10170035en_updt17.exe”,鼠标知识兔双击运行进入安装向导选择第一项“I accept the terms of the license agreement”(我接受许可协议的条款),再知识兔点击“install”进入下一步插图1")
2.知识兔点击“next”进入下一步插图2")
3.根据自身需求选择安装功能组件,需要安装的前面勾上即可.插图3")
4.软件安装需要一些时间请耐心等待即可插图4")
5.当安装完成后知识兔点击“finish”即可退出安装向导插图5")
6.安装完成后先不要运行软件,回到刚才下载的数据包中将破解文件“bentley.entliclib.dll”复制到软件的安装目录中替换原文件插图6")
7.最后运行软件即可免费使用咯插图7")
新功能
1、消耗来自许多相机和传感器类型的图像
使用从智能手机到高度专业的机载或地面多向采集系统的各种摄像机。利用任何可用的图像格式和元数据来创建3D模型。
2、消耗激光扫描数据
导入静态或移动激光扫描数据。将其与照片结合使用以获得非常高精度的真实感网格物体。
3、创建动画,视频和浏览
通过渲染任何大小的快照来生成高分辨率的正射影像和透视图图像。使用输出标尺,比例尺和位置设置图像尺寸和比例,知识兔以实现准确的重用。利用直观的基于时间的穿越和对象动画系统,知识兔可以快速轻松地制作电影。
4、创建高保真图像
使用高保真成像工具来支持精确映射和工程设计。几乎可以将任何格式和投影图像组合在一起。
5、创建可扩展的地形模型
使用并显示非常大的地形模型,知识兔以提高大型数据集的投资回报率。以多种模式显示可缩放的地形模型,例如带有阴影的平滑阴影,纵横比,高程,坡度,轮廓线等。将地形模型与DGN文件,点云数据等源数据同步。
6、利用可扩展的计算能力
通过将最新的计算系统用于台式机和集群处理单元来加快生产速度,并能够利用GPU计算,多核计算,高级捆绑块调整,平铺机制,任务排队和监视,网格计算以及超大型项目管理。
7、生成2D和3D GIS模型
使用各种地理空间数据类型(包括真实的正射影像,点云,栅格数字高程模型和Esri I3S格式)生成精确的地理参考3D模型。包括一个SRS数据库界面,知识兔以确保与您选择的GIS解决方案的互操作性。
8、知识兔将来自许多来源的数据与现实网格集成
通过将现实网格附加到网格的特定部分,知识兔可以使其具有诸如地理空间信息之类的附加数据,知识兔从而可以根据关联数据随后搜索和可视化网格区域。
9、整合定位数据
利用地面控制点或GPS标签精确定位地理参考模型。这使您可以对项目进行地理协调,并准确地测量坐标,距离,面积和体积。
10、测量和分析模型数据
通过直接在3D观看界面中进行距离,体积和表面积的精确测量,节省了获得准确答案的时间。
11、来自现实建模数据的模型几何
从现实模型中提取折断线,绘制线,曲面,平面,圆柱体和圆柱体中心线。有效地修剪和剖切点云和现实网格以简化矢量提取。
12、执行自动航空三角测量和3D重建
通过自动识别每张照片的相对位置和方向来完全校准所有图像。采用自动3D重建,纹理贴图以及对关系和重建约束进行重新纹理化,知识兔以确保高度准确的模型。
13、在点云上执行自动照片块对齐
在空气三角测量过程中,自动调整照片块以适合点云,知识兔从而实现两个数据源的精确校准和对齐,知识兔以创建高保真度的真实网格。
14、在2D图像和3D现实网格中同时执行导航和查看
通过单击现实网格中的一个点以显示全分辨率照片和同步的3D场景,利用照片导航来分析和执行质量评估。
15、发布和查看可用于Web的模型
生成针对Web发布进行了优化且可以使用免费的插件Web查看器进行查看的任何大小的模型。这样可以在Web上即时共享和可视化3D模型。
16、云按需扩展生产速度
通过直接从ContextCapture 17桌面界面切换到软件云处理服务,知识兔可以通过多引擎云处理满足最苛刻的期限。
17、在最终生产之前可视化,分析和测量现实网格
进行空气三角剖分后,知识兔可以利用Splat显示模式查看现实网格的草稿,知识兔以便更快地洞察以执行质量评估,照片导航和测量任务。
18、可视化,操纵和编辑现实建模数据
使用数十亿个点可视化和编辑点云,更改其分类,颜色并删除或编辑点。使用数以亿计的三角形来处理现实网格物体和可扩展的地形模型。导入,修饰和导出多种格式的网格。
使用帮助
一、光采集
1、交叠
应当从至少三个截然不同但并非根本不同的观点拍摄对象的每个部分。连续照片之间的重叠通常应超过三分之二。受试者同一部位的不同视点间隔应小于15度。
对于简单的主题,您可以通过在整个主题周围拍摄约30至50张均匀间隔的照片来实现。
对于航空摄影,知识兔建议纵向重叠为80%,横向重叠为50%或更多。为了获得最佳效果,请同时获取垂直和倾斜的照片,知识兔以同时恢复建筑物的外墙,狭窄的街道和庭院。软件对于非结构化获取非常强大。但是,您可以为更系统的采购准备飞行计划。
2、相机型号
软件支持广泛的相机:移动电话,紧凑型数字,DSLR,鱼眼,摄影测量和多相机系统。它可以处理数码相机的静态照片或提取的视频帧。它不支持线性推扫帚相机。它不支持快速运动下的卷帘相机。
尽管ContextCapture 17不需要最低的相机分辨率,但是与较低分辨率的相机相比,高分辨率相机允许以较少的照片以给定的精度捕获对象,因此拍摄速度更快。
软件需要知道相机传感器的宽度。如果知识兔您的相机型号尚未在知识兔的数据库中列出,则将要求您输入此信息。如果知识兔不确定相机的规格,则可以查阅相机的使用说明书或“数码摄影评论”网站:http://www.dpreview.com/products。
3、投影像素尺寸
在续集中,投影像素大小意味着将经典地面分辨率扩展到更通用的(可能是空中的)采集配置。
生成的3D模型的分辨率和精度与对象上投影的像素大小直接相关。为了获得所需的投影像素大小,必须采用焦距和到被摄体的距离的适当组合,如以下公式所定义:
投影像素大小×焦距×照片的最大尺寸=传感器宽度×到被摄物体的距离
[m/像素][mm][像素][mm][m]
由于软件会自动将投影像素大小的变化传播到生成的3D模型的分辨率和精度,因此不需要在整个图像上均匀投影像素大小。但是,软件无法将投影像素大小完全不同的照片连接在一起。如果知识兔要求范围很广,则应使用具有中间值的照片创建平滑过渡。
4、焦距
建议在整个采集过程中使用固定的焦距。
要获得不均匀的投影像素尺寸,请改变与被摄物体的距离。如果知识兔无法避免几种焦距设置,例如,如果知识兔到被摄物体的距离受到限制,请拍摄几组照片,每张照片都具有固定的焦距。
使用变焦镜头时,请确保其位置在一系列照片上保持固定。您可以使用一块带有手动变焦镜头的胶带将其固定在适当的位置。
如果知识兔指定了合适的相机型号类型,则可以使用广角或鱼眼镜头,软件可以自动估计极端的镜头畸变。
请勿使用数码变焦。
5、接触
选择可以避免运动模糊,散焦,噪点和过度曝光或曝光不足会严重改变3D重建效果的曝光设置。
手动曝光可减少所生成的3D模型的纹理图中颜色差异的可能性,因此,知识兔建议具有一定摄影技能并且知识兔在相当稳定和均匀的照明条件下进行手动曝光。否则,可能会使用自动曝光。
建议关闭光学或数字图像稳定功能。
6、灯光
环境恒定的照明优于直接照明和/或随时间变化的照明,因为后者会增加过度曝光和曝光不足的风险。对于室内采集而言,固定光源优先于闪光,对于室外采集而言,云(高空卷云,无雨)优于太阳。如果知识兔必须在晴天拍摄照片,请在中午左右拍摄,知识兔以尽量减少阴影区域。
请注意,正确曝光的阴影不会影响软件的性能,但会出现在生成的3D模型的纹理贴图中。
7、相片修饰
在将照片输入软件之前,请勿通过调整大小,裁剪,旋转,去噪,锐化或调整亮度,对比度,饱和度或色相来操作它们,请确保停用相机的自动旋转功能。
软件不支持拼接的全景照片。它需要用于创建全景图的原始照片。
8、相片组
为了获得最佳的精度和性能,软件必须将同一台物理相机拍摄的所有具有相同焦距和尺寸(相同内部方向)的照片归为一个照片组。
如果知识兔根据用于拍摄照片的相机将照片组织在子目录中,则ContextCapture 17可以自动确定相关的照片组:不同物理相机(即使知识兔它们是同一型号)拍摄的照片应放在单独的子目录中。相反,同一台物理相机拍摄的所有照片应放在同一子目录中。
9、口罩
可以将遮罩与照片相关联,知识兔以使工作流程中忽略图像的特定部分(例如,移动的障碍物,反射)。有效的遮罩是具有与照片相同尺寸的黑白TIFF图像。在空气三角测量和重建过程中,与蒙版的黑色像素相对应的照片像素将被忽略。
遮罩通过其文件名与输入的照片相关联:
(1)将遮罩与一张照片关联:对于名为“fileName.ext”的照片,遮罩文件必须命名为“fileName_mask.tif”,并与相应照片放置在同一目录中。示例:对于照片“IMG0002564.jpg”,相应的蒙版应为“IMG0002564_mask.tif”
(2)将遮罩与整个目录关联(需要相同尺寸的照片):如果知识兔目录中存在,则文件“mask.tif”用作该目录中所有照片的遮罩。加载照片后,知识兔也可以从用户界面为照片分配蒙版。>
下载仅供下载体验和测试学习,不得商用和正当使用。


![蚁族崛起电脑版-蚁族崛起PC版下载 v1.336.0[百度网盘资源]](/wp-content/uploads/2023/09/18/19/202309181957415951550000.jpeg)

